
Robotics
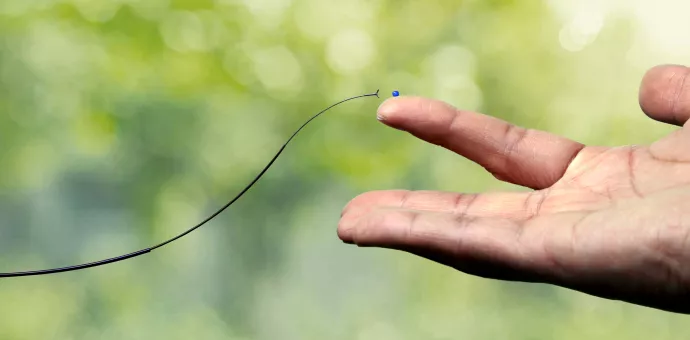
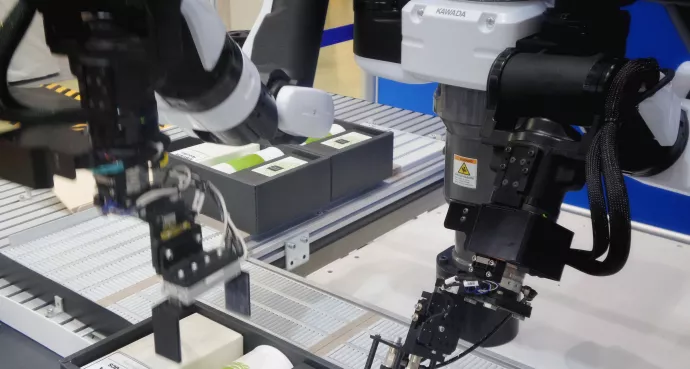
Robotics researchers at the Department of Mathematical & Computational Sciences are envisioning interactive robotics systems of the future. We develop cutting-edge robotics methodology and systems with a broad set of ideas in the following areas: mechanical design, continuum & soft robots, computer vision & 3D perception, robot learning, reasoning & planning, optimal control & reinforcement learning, and state estimation. Our research has applications in mobile manipulation, field & service robotics, medical & surgical robotics, legged locomotion, and human-robot interaction.


Jessica Burgner-Kahrs
Florian Shkurti
Igor Gilitschenski
Medical Computer Vision and Robotics
Lueder Kahrs
Computer Science Education
The CS Education Research Group of researchers focuses on the application and empirical assessment of modern learning principles in the context of undergraduate computing education. Recent projects have focused on peer instruction, blended and online teaching, teamwork in programming courses, and educational data mining. The group also develops and maintains software in support of computing classrooms.
Machine Learning
Computer Science Theory
Mathematics
Complex Dynamics
Algebraic Geometry
Symplectic Geometry
Ergodic Theory
Geometric Analysis
Metric Geometry
Harmonic Analysis
Number Theory
Arithmetic Statistics
Relativity Theory
Set Theory and Measurable Combinatorics
Mathematics Education
Statistics
Probability
Statistics Interdisciplinary Research
Statistics Education